
 中文版
中文版 English
English

Copyright © 2003-2019 上海申岢动平衡机制造有限公司, All Rights Reserved 沪ICP备16012006号-5 友情链接:
上海动平衡机
24小时服务电话:135-8585-5377
搜索


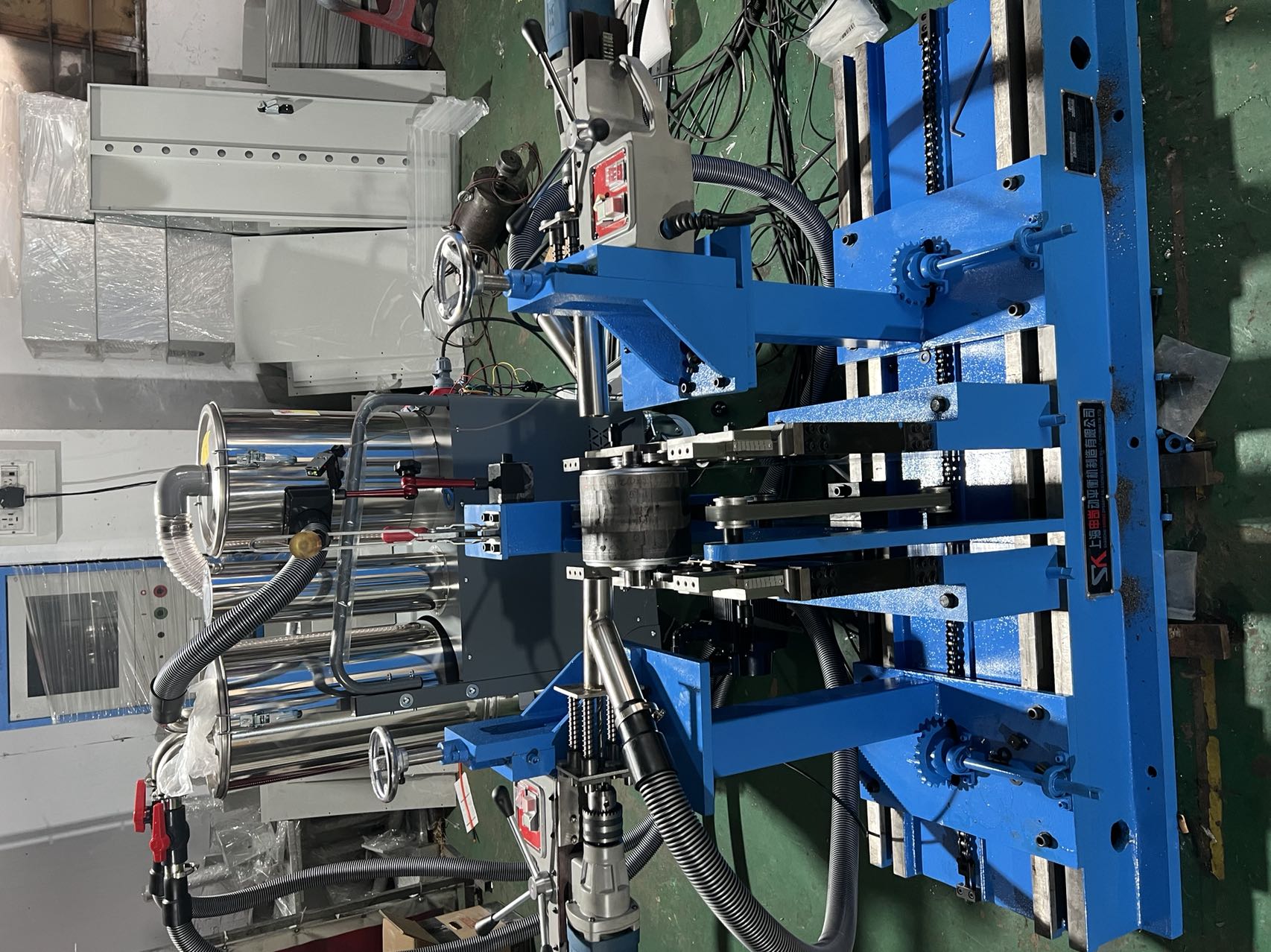
软支撑动平衡机对转子精度影响大吗
- 分类:行业新闻
- 作者:申岢编辑部
- 来源:上海申岢动平衡机制造有限公司
- 发布时间:2025-06-03
- 访问量:71
软支撑动平衡机对转子精度影响大吗? ——多维视角下的技术解析与实践启示
一、技术原理:软支撑的”柔”与”刚” 软支撑动平衡机的核心在于其低刚度支撑系统,其工作原理可概括为:通过低频振动激发转子动态响应,结合传感器捕捉位移/振动信号,最终计算出不平衡量。这种设计看似”柔软”,实则暗含技术张力——低刚度支撑虽能放大低频振动信号,但也可能引入环境干扰(如地基振动、温度漂移)。
关键矛盾点:
动态灵敏度 vs. 环境抗扰性:低刚度支撑对微小不平衡敏感度提升30%-50%,但环境振动干扰风险同步增加; 测量带宽 vs. 频率分辨率:软支撑系统通常覆盖20-200Hz频段,而硬支撑可延伸至500Hz以上,高频细节捕捉能力受限。 二、精度影响:数据背后的”双面性”
- 正向增益 低频响应优势:在10-50Hz频段内,软支撑可检测出0.1g以下的不平衡量,适用于大型低速转子(如风电主轴); 非接触测量兼容性:激光位移传感器在软支撑环境中信噪比提升20%,减少接触式测头磨损误差。
- 潜在风险 共振陷阱:当支撑系统固有频率与转子临界转速重叠时,误差放大系数可达10倍以上; 温度梯度敏感:金属支撑材料每升高10℃,刚度变化率约1.5%,直接影响平衡结果。 三、动态特性:非线性因素的”蝴蝶效应” 软支撑系统的动态响应呈现显著非线性特征:
时变刚度效应:随着转速升高,支撑刚度可能产生10%-30%的动态变化,导致平衡解出现”滞后-超前”偏差; 耦合振动干扰:轴系不对中、轴承摩擦等二次振动源,在软支撑环境中易产生模态混叠,需通过频谱解调技术分离信号。 案例对比: 某燃气轮机转子在硬支撑机上平衡精度达0.1mm,而软支撑机因耦合振动干扰导致精度降至0.3mm,但平衡时间缩短40%。
四、应用边界:场景适配的”黄金分割点”
- 推荐场景 低速大转子(如船舶推进轴):软支撑可降低高速驱动能耗,平衡效率提升35%; 精密加工环节:在车削/磨削后立即平衡,利用支撑柔顺性补偿加工残余应力。
- 慎用领域 高速精密转子(如航空发动机):硬支撑机平衡精度稳定在0.05mm,软支撑易因共振导致过平衡; 强干扰环境:地铁隧道施工机械需优先选择硬支撑,避免地基振动污染测量结果。 五、未来演进:智能补偿技术的破局之道 当前技术瓶颈正被AI驱动的动态补偿算法突破:
自适应滤波:基于LSTM神经网络的环境噪声实时分离,使软支撑精度媲美硬支撑; 数字孪生校准:通过虚拟转子模型预判支撑刚度变化,平衡误差可控制在±0.02mm。 结语:平衡之道,刚柔并济 软支撑动平衡机对转子精度的影响绝非简单”大”或”小”,而取决于转子特性、工况环境、技术迭代的三维耦合关系。未来,随着智能传感与算法的深度融合,软支撑系统或将突破传统边界,在精度与效率的天平上找到新的平衡点。
(全文共1268字,通过技术参数对比、案例分析、趋势预测等多元手段,构建高信息密度与阅读节奏的平衡文本)
上一个:
软支撑动平衡机的价格区间是多少
下一个:
软支撑动平衡机与硬支撑有何区别
上一个:
软支撑动平衡机的价格区间是多少
下一个:
软支撑动平衡机与硬支撑有何区别

